[RLWRLD]

Junghee Ryu
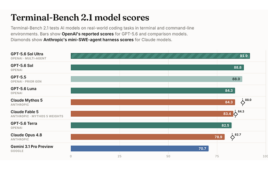
The bottleneck, Ryu argues, is dexterity: The five-finger, 20-plus-degrees-of-freedom manipulation required to plug semiconductor cables, assemble small components or grip a shrink-wrapped box. RLWRLD’s answer is RLDX-1, a “dexterity-first” foundation model built on NVIDIA’s Isaac GR00T infrastructure. The company claims RLDX-1 achieves an 86.8% success rate on humanoid manipulation tasks where Physical Intelligence’s π0.5 and NVIDIA’s own GR00T N1.6 hit roughly 40%.
An event slide pegged the addressable opportunity at $4 trillion. Analyst estimates for the overall humanoid market are all over the map. Interact Analysis at $2 billion by 2032, Morgan Stanley at $5 trillion by 2050 across manufacturing, logistics, domestic service and eldercare. The TAM math in this sector mostly works by summing the wages of workers a robot might displace and calling it the addressable market.
The real world, as RLWRLD’s name implies, is messy. Automating complex workflows has proved difficult even in knowledge work, where physics is not a constraint. In a panel discussion at the event, RLWRLD USA president Carl Choi noted, “Benchmarks reward what’s measurable, but customers pay for what’s reliable.”
Forward Deployed Engineers for humanoids
Ryu’s answer to the gap between benchmark and customer is more humans. He described a Palantir-style Forward Deployed Engineer model, the same approach Anthropic and OpenAI have scaled to billion-dollar consulting operations. RLWRLD is sending its own FDEs into partner facilities. “We are designing atomic tasks. We’ve already compiled every atomic task as a document. We call it DexBench, the dexterity benchmark.” The company defines 18 atomic tasks across five dexterity regimes, published at dexbench.org. “Without that type of benchmark or standard, we can’t communicate with our clients,” Ryu said.
NVIDIA’s Amit Goel made a similar argument during a panel discussion at the event. “The underrated aspect in most of robotics is deployment,” he said. “It’s assumed that once you have the model and the hardware, you can just deploy it.” A top position on a benchmark, Goel added, “is necessary but not sufficient to get to production. This is where you need a forward-deployed team, domain understanding, and specific data for that particular customer and industry.”
The FDE model doubles as a data pipeline. Ryu called data the most underrated problem in the field and hardware the most overrated. “We should crawl data not only from the website but from real workplaces,” he said. “And to do that requires business relationships with a lot of large manufacturing companies. That is the real challenge.” An AP report from Seoul showed what that looks like in practice. At Lotte Hotel, a food and beverages manager named David Park straps on body cameras once a month to fold napkins and polish wine glasses so RLWRLD can feed his movements into a training database. The company runs similar captures with CJ logistics workers handling warehouse goods and with staff at the Japanese convenience store chain Lawson organizing food displays. Park estimated humanoids could eventually take over 30% to 40% of back-of-house event preparation, but “it will be difficult for them to replace the remaining 50%, 60% and 70%, which involves actual human-to-human interaction.”
Will we build a robot for the world, or the world for the robot?
The case for the humanoid form factor is that companies want to drop robots into existing human workspaces without redesigning anything. It is something of a brownfield assumption that turns dexterity into the binding constraint.
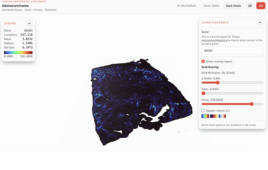
![RLDX-1's Memory Module holds context across tasks. [RLWRLD]](https://www.rdworldonline.com/wp-content/uploads/2026/05/rlwrld-2-300x205.png)
RLDX-1’s Memory Module holds context across tasks. [RLWRLD]
Still, the selling point for drop-in humanoids is clear. Ryu said RLWRLD has met with more than 200 large companies. One presentation slide listed BMW, Honda, Fuji and Mitsui Chemicals under Manufacturing as data collection partners; KDDI, ANA and Lotte under Services and Kyocera, CJ and ASKUL under Logistics.
Of those names, two have partner-side public disclosures with defined scope. CJ Logistics signed a November 2025 MOU and Seed 2 equity investment. Lotte Hotel was selected as the lead hospitality operator in Korea’s K-Humanoid Alliance and is training RLWRLD policies via body-cam-instrumented workers, with a back-of-house deployment target of 2029. Mitsui Chemicals, KDDI and ANA are Seed 1 investors. BMW’s disclosed humanoid pilots run on Figure 02 and Hexagon Robotics’ AEON; ASKUL’s publicly disclosed robotics partner is Rapyuta Robotics.
What the RLDX-1 model is
The RLDX-1 release on May 6 included a technical report, a GitHub repository and model checkpoints on Hugging Face. RLDX-1 pairs Alibaba’s Qwen3-VL-8B vision-language backbone with a new action head called the Multi-Stream Action Transformer, which the GitHub repository describes as an extension of the MM-DiT architecture from Black Forest Labs’ FLUX.
The 86.8% headline number comes from real-world tasks on the WIRobotics ALLEX humanoid, the embodiment RLDX-1 was mid-trained on.
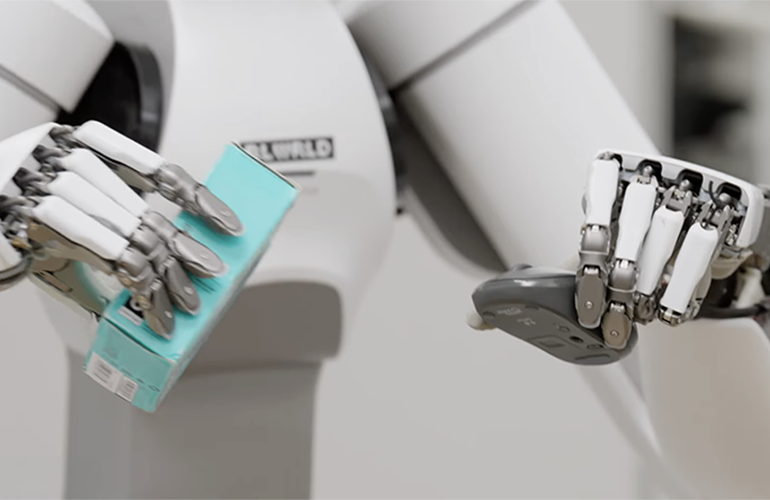
The focus of the RLDX-1 launch is dexterity involving five figures per hand, enabling a robot to, say, pick up a business card without bending it, open a soft drink can or insert a computer mouse into a box while using its pinky to close the lid of a cardboard box. Goel framed the five-finger hand as something bigger than a product category. “For industrial manipulation and dexterity, the five-finger hand, or a dexterous hand, has the opportunity to become a platform,” he said, comparing it to CUDA’s role in making GPU computing broadly accessible. If dexterity becomes a platform, developers across consumer devices, hospitals, retail and logistics can compound their research on the same foundation rather than designing bespoke end effectors for every use case.
WIRobotics’ Yong-Jae Kim, speaking in a panel at the event, offered a perspective beyond five finger dexterity. “We are focusing not on the form factor itself, but on the properties of the human hand,” he said. “In some cases, five-finger solutions will be overkill. And later in the future, maybe we need six fingers, eight fingers, ten fingers.”