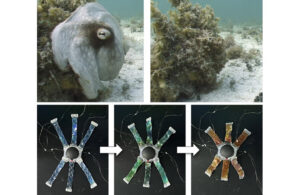
cuttlefish demonstrates natural camouflage (top), inspiring KIST’s OCTOID soft robot (bottom), which uses photonic crystal polymers to shift colors from blue to green to orange in response to electrical signals. Courtesy of KIST.
A research team at the Functional Composite Materials Research Center at the Korea Institute of Science and Technology (KIST) has developed an octopus-inspired soft robot called OCTOID that changes color in response to electrical stimulation, moves to match its surroundings and grabs objects, they reported in Advanced Functional Materials in October. The robot could have applications in health care, search and rescue and manufacturing.
The core material of OCTOID, which allows it to move and bend, is photonic crystal polymers. Controlling the helical molecular arrangement and network structure of the polymers allowed the scientists to design a structure capable of soft, flexible movement and color changes that mimic an octopus’s tentacle. By tailoring the polymers, two distinct layers were created: an active layer exhibiting tunable optical response—the color change—and a passive layer with mechanical properties, allowing for movement and grabbing.
When an electrical signal is applied to the active layer, the material’s surface expands and contracts on a microscopic level, displaying a color change. The robot also performs bending and unfolding motions through asymmetric structural changes. These features allow OCTOID to camouflage, move and grab objects within a single system.
OCTOID’s three-in-one system could expand into diverse fields like exploration robots, deep-sea rescue and marine ecology equipment, assistive robots for rehabilitation and medical use and defense and concealment technologies.
“Through this research, we have secured materials for soft robots that can be applied to various fields, including autonomous adaptive robots, military camouflage systems, marine exploration robots and medical micro-robots,” said Dae-Yoon Kim, a principal researcher at KIST. He added, “We aim to expand this technology into the development of intelligent soft machines, such as self-aware, reflexive and learning-based soft robots.”
Soft robotics safety
Soft robots are ideal for applications that require flexibility, gentle handling or other tasks that are difficult for traditional robots. For example, soft robots can more easily navigate rough terrain, making them ideal for search-and-rescue missions.
However, their flexibility can also produce unpredictable forces. While KIST researchers focus on materials, a team at the Massachusetts Institute of Technology is solving the challenge of safety.
“Since soft robots emerged, the field has highlighted their embodied intelligence and greater inherent safety relative to rigid robots, thanks to passive material and structural compliance. Yet their “cognitive” intelligence — especially safety systems — has lagged behind that of rigid robots,” says co-lead author Maximilian Stölzle, a research intern at Disney Research and visiting researcher at MIT LIDS and CSAIL.
Researchers at the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) and the Laboratory for Information and Decisions Systems (LIDS) have developed a framework that blends nonlinear control theory—controlling systems with complex dynamics—with advanced physical modeling techniques and real-time optimization, resulting in what they call “contact-aware safety.”
High-order control barrier functions (HOCBFs) define safe operating boundaries, ensuring the robot doesn’t use unsafe forces. At the same time, high-order control Lyapunov functions (HOCLFs) guide the robot efficiently toward its task objectives, balancing safety with performance.
“Essentially, we’re teaching the robot to know its own limits when interacting with the environment while still achieving its goals,” says Kiwan Wong, a doctoral student in mechanical engineering at MIT and the lead author of the paper, published in IEEE Control Systems Letters in October. This research could pave the way for soft robots in health care, industry and domestic settings.