The beginning of 2026 has been an exciting time for robots, with several bio-inspired robotic advancements announced from around the world. An inflatable robot from China can grow and shrink, walk on land and water, swim and even fly. In Switzerland, two robots are making history. First, a zebrafish inspired bot that is helping unlock the mysteries of intermittent swimming, and second, a hand robot straight out of “The Addams Family.”
GrowHR: the shrinking robot inspired by human bones
Researchers in China unveiled a soft humanoid robot last month that features a human bone-inspired structure. The robot, called GrowHR, has air-inflated limbs that can stretch to over three times their original length, allowing it to grow from 0.49 meters to 1.36 meters in height.
GrowHR
The robot’s “bones” are made of soft, airtight chambers wrapped in tough fabric. When air is pumped into the limbs, they extend while maintaining their structure through tension cables, small motors and carbon-fiber guides.
The robot can shrink to 36% of its height and 61% of its width, allowing it to squeeze through narrow spaces. The robot can walk on water, swim and fly. Its soft structure allows it to absorb impact without breaking and safely interact with humans.
With weights and fins on its feet for stability, GrowHR can walk across water at a speed of 16 millimeters per second. The robot’s lightweight structure, weighing only 4.5 kg, and its air-filled body provide the buoyancy that keeps it on the surface.
GrowHR can also swim using servomotors to move its legs. The researchers claim the robot can keep a person weighing up to 72.8 kg, approximately 160.5 pounds, afloat, potentially being useful for water rescues.
With the aid of ducted fans or quadrotors, GrowHR can fly up to several meters. The robot is equipped with two electromotor-driven rotors, although it cannot fly long distances with them.
When GrowHR coordinates its growth actuation with joint motors, it can crawl 1,122 times faster than using either method alone, traveling about 112.2 millimeters per minute.
ZBot swims in bursts like larval zebrafish
Researchers from the Biorobotics Laboratory at the École polytechnique fédérale de Lausanne (EPFL) in Switzerland built a zebrafish-inspired robot called ZBot. Many fish, including larval zebrafish, swim in a burst-and-glide pattern rather than swimming continuously. To investigate whether this method is more energy efficient, ZBot replicates the features of larval zebrafish, including a network model inspired by neural circuits and kinematic recordings of larval zebrafish.
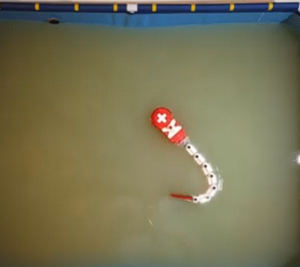
ZBot
ZBot allowed the researchers to discover that intermittent swimming lowers the energetic cost of transport across most achievable velocities in two flow regimes — turbulent and viscous.
Previous research has attributed the efficiency of intermittent swimming to reduced drag during gliding. However, this study identified an additional benefit: better actuator efficiency. An actuator converts energy into motion. In a robot, this is any device such as electric motors or hydraulic pistons. In animals, this is muscles. Actuator efficiency is the ratio of useful mechanical work output to energy input.
The researchers found that intermittent swimming naturally operates the motor closer to its peak efficiency zone. In continuous swimming, the motor runs constantly at moderate power. During intermittent swimming, the motor works harder and faster in short bursts and is off during glides, resulting in less total energy consumption.
By testing the robot in both turbulent and viscous flow regimes, the researchers found that viscous flow reduced distance traveled but minimally affected turning angles. In turbulent flow, intermittent swimming reduces drag during gliding. In both flow regimes, the motor operates at higher inherent efficiency during burst phases.
A detachable hand robot can “walk”, pick up objects
At the EPFL School of Engineering, researchers created a detachable robotic hand that might look familiar to fans of The Addams Family. The Thing-like robot can walk on its fingertips, bend its fingers backward and pick up and carry one or more objects at a time. The robot could navigate and retrieve objects in spaces too small for human hands, the researchers report in Nature Communications.

EPFL School of Engineering
Unlike a human hand, the robot features a symmetrical design, with a palm 16 cm in diameter and six identical silicone-tipped fingers. With this design, any two of the fingers can form opposing pairs and pinch objects. The fingers can also bend backward, meaning the palm and the back of the hand are interchangeable.
By holding objects under its palm, on its back or both, the robot can crawl while holding objects. The researchers demonstrated that it could retrieve up to three items and carry up to 2 kg. With six fingers, the robot can accomplish tasks that would require two human hands, such as unscrewing a bottle cap or using a screwdriver.
The robot was inspired by the flexible arms of the octopus and the specialized limbs of the praying mantis. The finger placements, roles and locomotion gaits were optimized using a genetic algorithm which revealed that three to six fingers provided the best performance. The robot’s motion is controlled by a central pattern generator (CPG) producing stable, cyclic movements that adapt to terrain.
The researchers envision the robot being applicable in industrial settings, search and rescue and even prosthetic applications.