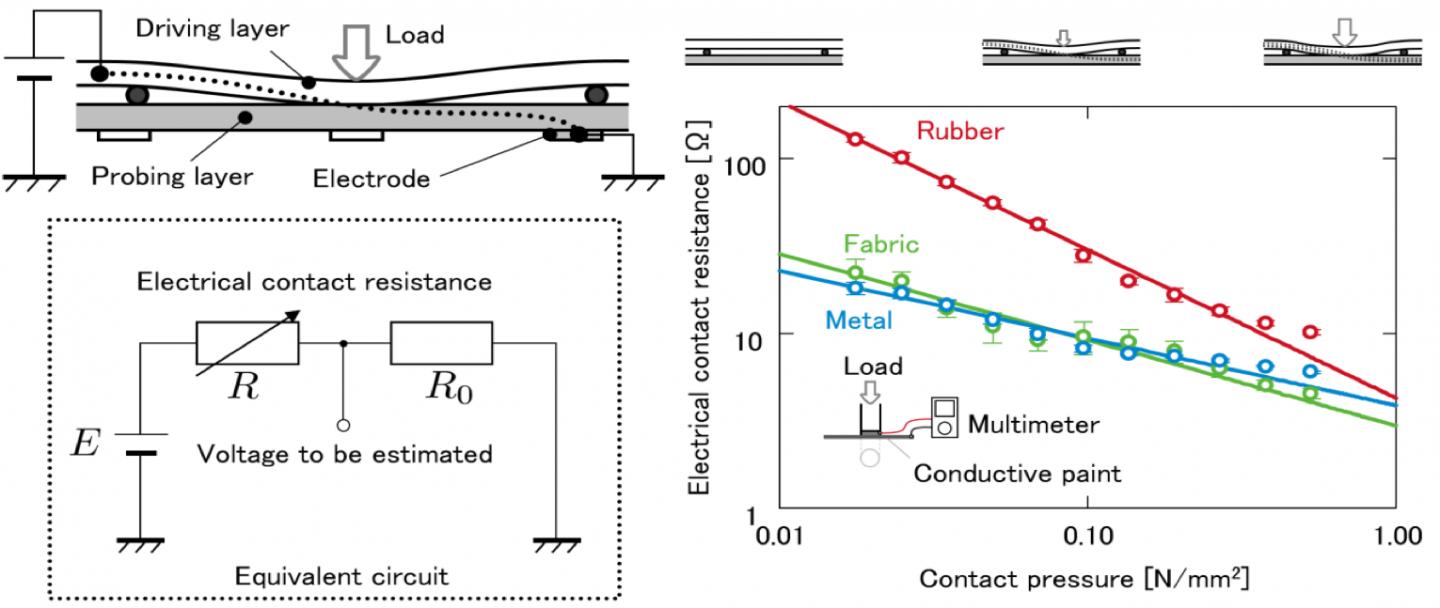
This is the sensor principle and illustration of the relationship between the electrical contact resistance and the contact pressure. Credit: Osaka University
Touch, or tactile sensing, is fundamentally important for a range of real-life applications, from robotics to surgical medicine to sports science. Tactile sensors are modeled on the biological sense of touch and can help researchers to understand human perception and motion. Researchers from Osaka University have now developed a new approach to pressure distribution measurement using tactile imaging technology.
Pressure is one of the primary characteristics of touch, and tactile imaging can be used to measure pressure or stress distributions across an object of interest. The most common current approach to tactile imaging involves use of an array of sensors composed of pressure-sensitive materials. However, such arrays require complex fabrication processes and place limitations on the sensor design, hence the necessity of a new method, now outlined in an article in IEEE Transactions on Industrial Electronics.
“The pressure between two conductors is directly related to the electrical contact resistance between them,” states Osaka University’s Osamu Oshiro. “We used this relationship to develop a sensor composed of a pair of electromechanically coupled conductors, where one conductor had a driving function and the other performed the probe function. This sensor has no need for pressure-sensitive materials and is simpler to manufacture.”
This strategy enabled development of a universal tactile sensor for contact pressure distribution measurement using simple conductive materials such as carbon paint. The design concept combined innovation in mechatronics technology, which enabled development of a flexible sensor based on conventional conductors connected to electrodes, with a tomography-based approach to determining the pressure distribution across the coupled conductors.
The proposed method improved on previous electrical impedance tomography-based tactile sensing techniques to provide sensors with high positional accuracy, adjustable sensitivity and range, and a relatively simple fabrication process. “The sensors can be realized using various conducting materials, including conductive fabrics and paints,” says lead author Shunsuke Yoshimoto. “Sheet-type flexible sensors were fabricated, along with finger-shaped sensors produced by coating 3D-printed structures with conductive paint, to illustrate possible practical applications.”
The ease of adjustment of the sensitivity and sensing range and the pressure estimation precision means that this tactile imaging approach is expected to enable advanced control of multipurpose robots. “These sensors are expected to be applicable in fields including remote device operation and industrial automation,” states co-author Yoshihiro Kuroda.